Artec Eva 3D scanner is used to develop ergonomic exoskeletons
Kevin Langlois, a PhD researcher at Vrije Universiteit Brussel (Free University of Brussels), believes that mankind is on the verge of a technological revolution that will radically change our way of life. Kevin is a member of the university’s Robotics & Multibody Mechanics (R&MM) research group, whose main area of focus is wearable robotics, such as powered exoskeletons. Kevin believes that robotic assistive technology is one of those major technologies that can help to keep health care costs under control, because it contributes to keeping people mobile, less dependent on care and decreases the risk of secondary health effects of immobility.
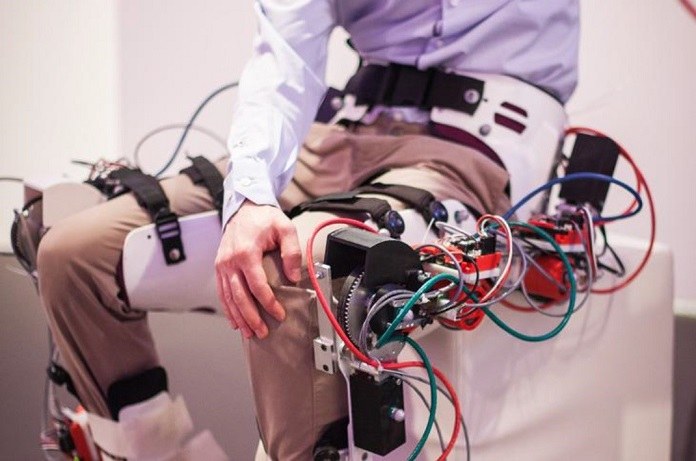
Despite the fact that remarkable progress has been made in this research area, a major problem has yet to be solved: How to achieve perfect interaction between a human being and their robotized exoskeleton? On the mechanical level, this question boils down to how to achieve absolute adhesion between the two entities.
This question is not that easy to answer, given that each person is unique anthropometrically (the dimensions of the limbs and their capabilities) and biomechanically (the way the person walks). This suggests that you need a customized solution for each individual.
Ready-made solutions are not the best option, R&MM’s experience shows. Initially, the group started out by purchasing adjustable orthoses for their research that were attached to the body by straps and brackets. These fixtures, however, turned out to get misplaced quite often, resulting in inefficient performance of the exoskeleton.


